- Published on
【论文分享】|FLUX
- Authors

- Name
- 刘思然
- GitHub
- @VAthree
FLUX: Fast Software-based Communication Overlap On GPUs Through Kernel Fusion
目录
一、背景
(1) AllReduce 算子实现
AllReduce 是集合通信中常见的分布式计算操作,用于多个设备(比如多个 GPU)之间聚合数据的场景,可以包含 Sum、Min、Max 等操作。对于常见的基于 Ring 的 AllReduce 实现中,通常可以把 AllReduce 操作看成为一个 ReduceScatter 和一个 AllGather 操作,如下图所示:具体的 ReduceScatter 操作如下,每个设备(GPU)发送一部分数据给下一个设备,同时接收上一个设备的数据并累加。这个过程进行 K-1 步(假设有 K 个设备),ReduceScatter 后每个设备都包含一部分数据的 Sum:
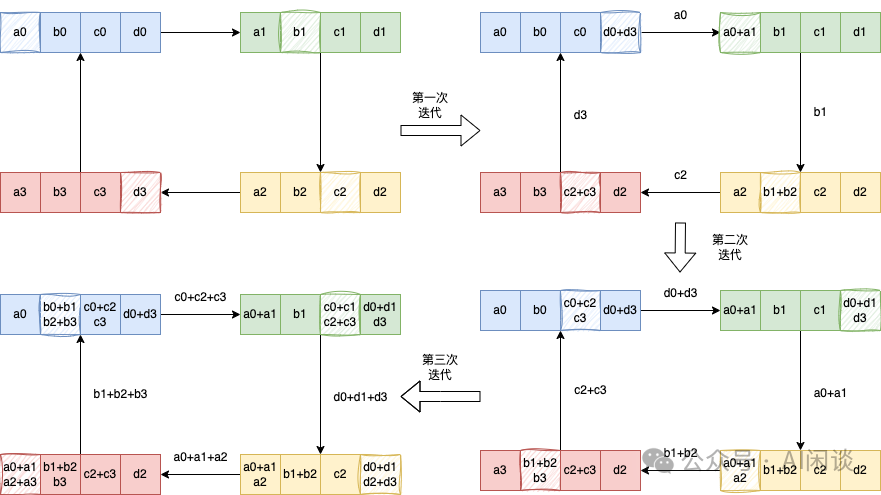
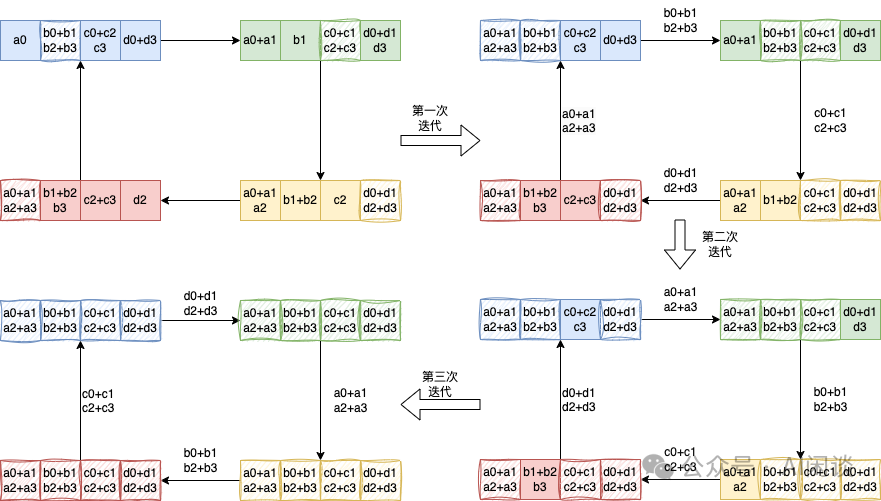
具体的 AllGather 操作如下,每个设备将其持有的部分结果发送给下一个设备,同时接收上一个设备的部分结果,逐步汇集完整的结果,同样需要 K-1 步。AllGather 后,每个设备都包含全量的数据:
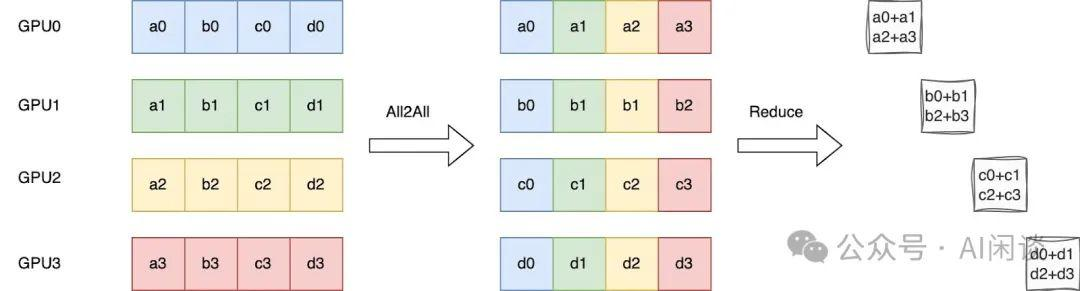
(2) ReduceScatter 算子实现
如下图所示为 Ring ReduceScatter 的优化,可以等效为一个 All2All 操作实现数据的重排,然后在 Local 进行 Reduce 操作。此过程只有一个 All2All 的整体通信操作,虽然实际上与 Ring 实现的方式的通信量和计算量没有变化,但可以避免 K-1 个 Ring Step 的同步,进而可以有效降低时延。
(3) 通信具有较高占比
相比于流水线并行提高吞吐量,张量并行可以缩短延迟,这对于推理至关重要。由于张量并行将层划分到多个设备上,可能需要跨设备进行额外的数据通信,以便收集或重新分配正确的数据,特别是当连续的层采用不同的划分策略或跨分区消耗数据时。下图显示了在训练和推理中应用张量并行时,通信时间在总体运行时间中占据的显著部分,表明了减少通信时间暴露的动机和强烈需求。
- 可以看出,在 PCIe 设备中通信占比很高;而 H800 NVL 相比 A100 NVL 的算力提升更多,通信带宽提升较少,也就导致通信占比更高。在 PCIe 设备中 TP 通信占比甚至达到 40%-60%。
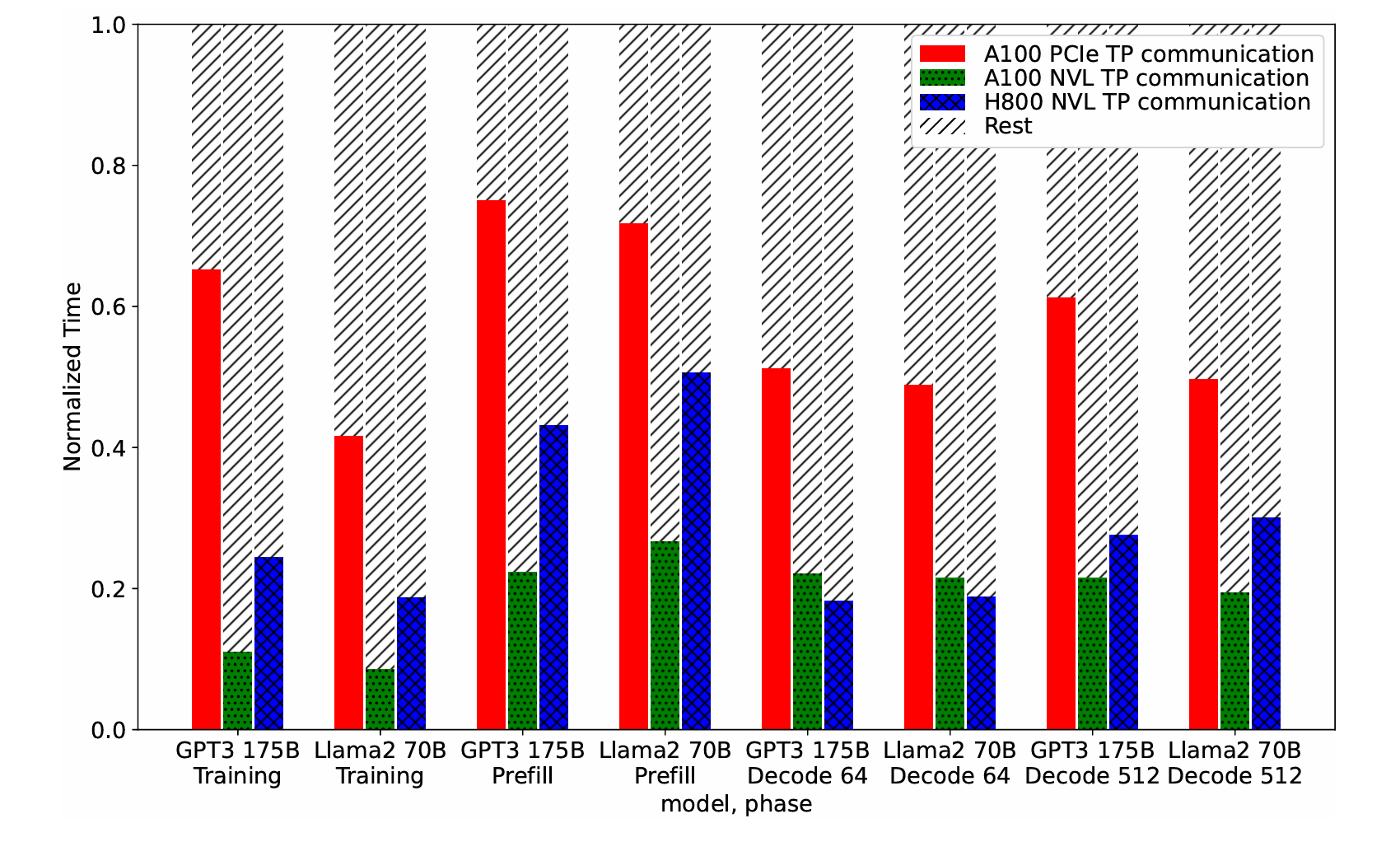
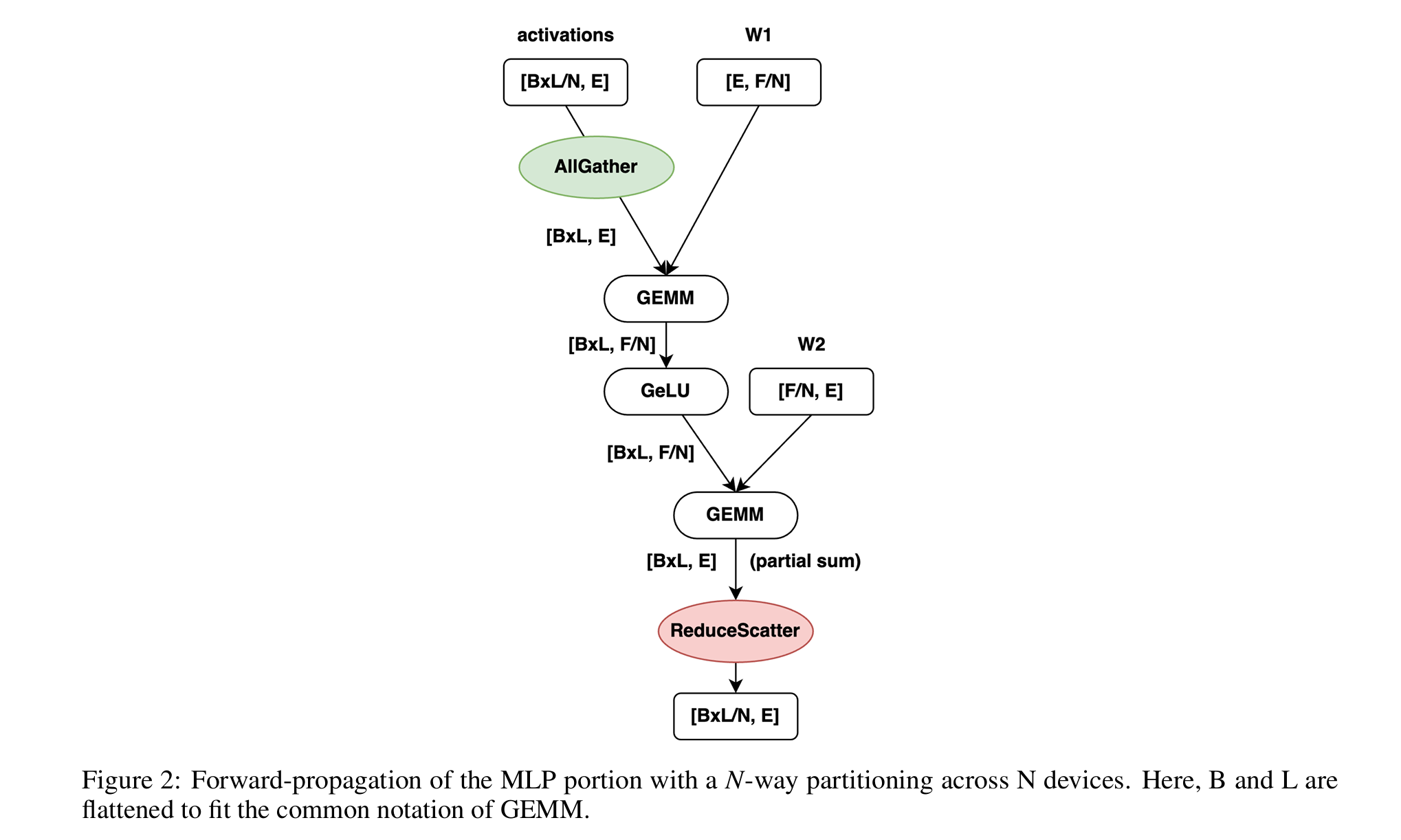
图 2 展示了 MLP 示例在前向传播中的常见通信分区模式。第一个 GEMM 操作沿行方向分片权重(W1),并在 GEMM 之前沿列方向全收集(AllGather)分片的输入激活;第二个 GEMM 操作沿列方向分片权重(W2),并沿列方向归约分散(ReduceScatter)输出激活。在反向传播中,AllGather 和 ReduceScatter 操作顺序互换。图中显示,这两个 GEMM 操作的维度取决于张量并行的程度(N)。
二、Motivation
(1) 传统通信重叠策略
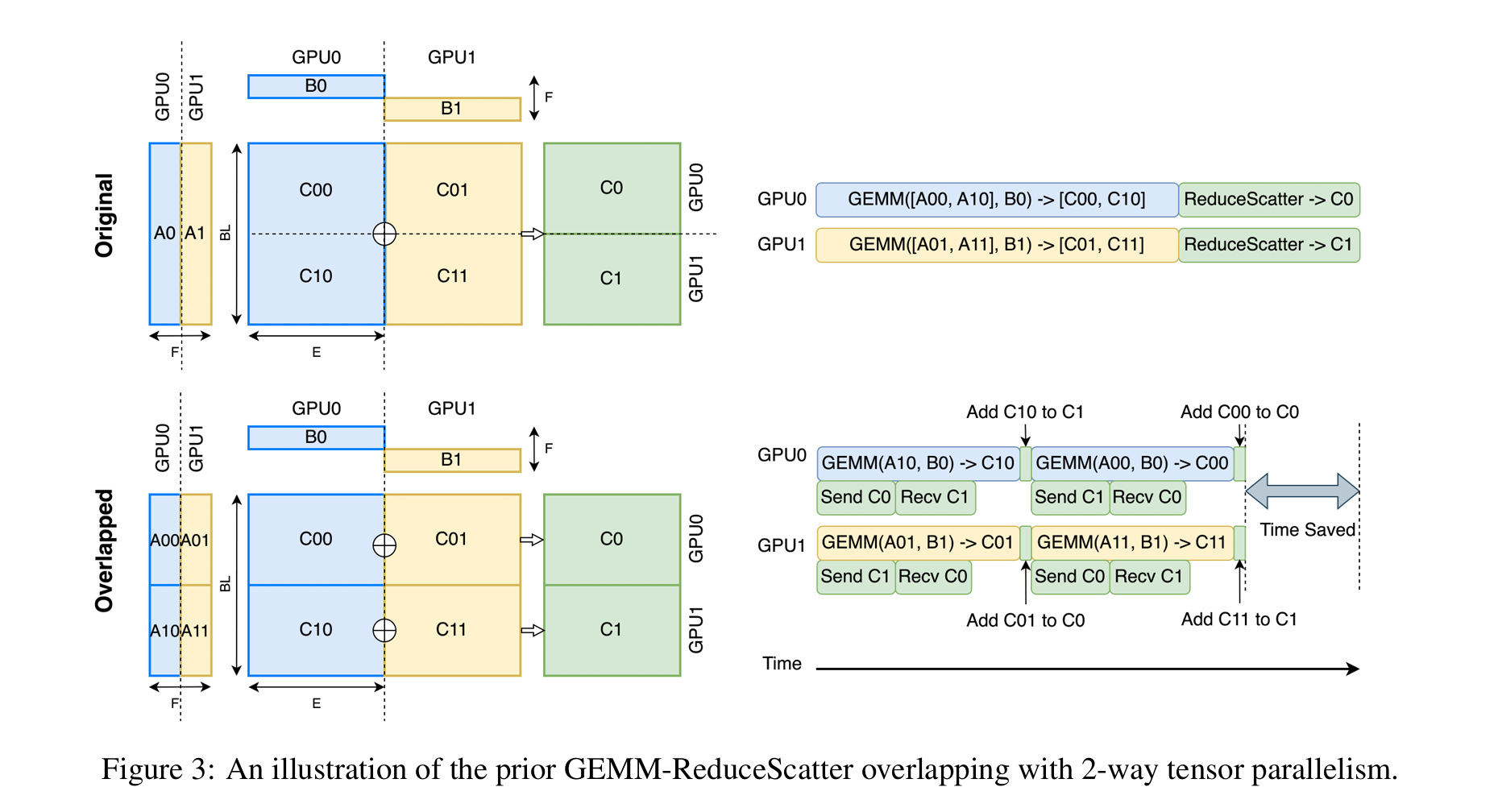
传统方法将原始计算和通信操作分解为多个块,然后通过精心调度操作来潜在地重叠通信与计算。分解中的分区数量与张量并行中的设备数量一致(或是其两倍,以更好地利用双向数据传输)。限制分区数量可以避免复杂的调度并减少可能的调度开销。图 3 展示了一个 ReduceScatter 重叠的场景。理想情况下,通信可以完全被 GEMM 计算隐藏。
这些方法在 TPU 上可能效果很好,但在 GPU 上效果不佳。原因在于:
- 涉及许多流和事件的 GPU 环境难以控制:这些方法的性能严重依赖于独立分区的执行顺序、并发执行和执行时机。虽然可以通过流和事件实现 GPU 内核之间的执行顺序和并发执行,但大多数 GPU 编程模型无法轻松控制执行时机。单个操作的时间变化可能稳定可控,但在涉及许多流和事件的实际生产环境中通常变得不可预测
- 切分来做 overlap 带来了额外的同步:ReduceScatter 重叠通常需要在 GEMM 操作之间执行额外的计算操作(如图 3 中的加法操作),这会产生数据依赖,阻止通过 GPU 多路复用并发执行多个 GEMM 内核。虽然可以进一步将加法操作与通信融合,但仍阻止多个 GEMM 内核的并发执行。
- 切分来做 overlap 导致无法打满 GPU:将一个大型 GEMM 内核拆分为多个小型 GEMM 内核,即使分区数量与设备数量相同,也很可能导致 GPU 流处理器(SMs)未被充分利用,特别是在张量并行扩展时。
(2) 对比指标
衡量通信重叠方法的性能并不简单。重叠方法通常将通信与计算混合,使得直接测量重叠时间变得困难。此外,将一个 GEMM 内核拆分为多个小内核会增加计算时间,但更长的计算时间可能提供更多机会来重叠通信,最终可能不会缩短总时间。
总体时间是一个公平的性能指标,但不同方法可能使用不同的 GEMM 算法和实现,影响总时间。作者提出了有效通信时间(ECT),以公平比较不同方法并突出通信时间。有效通信时间定义为总时间减去最佳非拆分 GEMM 计算时间:
为了最小化 GEMM 内核的影响,作者在所有评估中使用作者所知最快的 GEMM 内核。由于在不同方法中使用相同的最快 GEMM 内核,给定问题的形状,使得 GEMM_non-split 在不同方法中相同,有效通信时间只是总时间的一个偏移,但更突出通信。在有效通信时间的基础上,作者进一步定义了重叠效率(E_overlap):
三、Flux 设计
相较于传统方法在 GPU 上更具优势。不同于现有方法将计算和通信划分为设备数量或其两倍,Flux 将计算和通信过度分解为多个小块。由于计算操作是 GEMM,而大多数高性能 GEMM 内核在 GPU 上使用如线程块或 warp 的 tiling 技术,作者的分解可以自然地映射到现有内核的 tiling 中。
Flux 将相关的通信和/或等待逻辑融合到一个 GEMM 内核中,只启动一个融合内核,而不是像之前的方法那样启动多个拆分的 GEMM 内核。考虑到 Flux 比之前的方法粒度更细,本文将之前的方法称为中等粒度分解,而将提出的方法称为细粒度分解。
(1) GEMM 步骤分解
- Prologue(前奏):做准备工作,比如加载常量、分配寄存器、设置指针等。
- Mainloop(主循环):进行核心的分块矩阵乘法(tile-based multiply-accumulate),不断把 A、B 的 tile 搬到寄存器/共享内存,做乘加,累加到 accumulator(acc)。
- Epilogue(尾声): 把累加器(acc)里的结果做最后处理(如加 bias、激活、量化、归一化、通信等),并写回输出矩阵 C。
(2) ReduceScatter 重叠
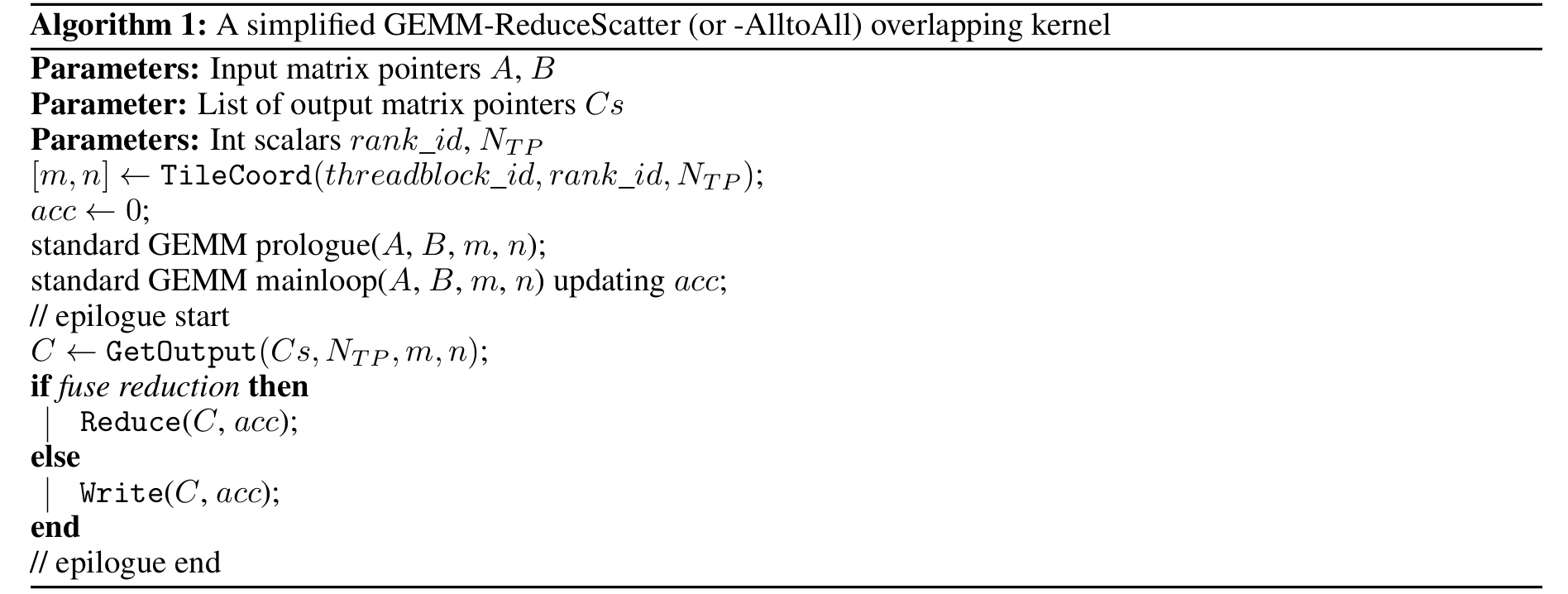
ReduceScatter 被实现为 GEMM 内核的尾部融合。具体来说,ReduceScatter 通信被融合到 GEMM 内核的尾部。算法 1 展示了融合了 ReduceScatter(或 AlltoAll)的 GEMM 伪代码,用于计算 C = A x B,其中 A 和 B 是两个输入矩阵,C_s 是张量并行中所有设备上的输出矩阵指针集合。
与标准 GEMM 内核只有一个输出指针不同,融合 GEMM 内核中的输出指针数量增加到张量并行中的设备数量 NTP,这些指针可以通过对应 PyTorch 操作的初始化阶段的进程间通信收集。
- TileCoord:根据线程块 id 和 rank_id,决定当前线程块负责输出矩阵 C 的哪一块(tile)
- GetOutput:在多卡并行时,输出 C 不再是单一指针,而是一个指针数组(每个卡一个),根据 tile 位置和 rank_id 选出本 tile 的目标输出
- Reduce/Write:
- 如果是 ReduceScatter,先做 AlltoAll 通信再本地 Reduce(Reduce 分支)。
- 如果只是 AlltoAll,直接 Write(Write 分支)。
把 ReduceScatter/AlltoAll 通信融合进 GEMM 的 epilogue,即 GEMM 每算完一块 tile,就立刻发起通信,而不是等整个 GEMM 结束,主循环继续算下一个 tile。ReduceScatter 操作可以进一步分解为 AlltoAll 操作和一个归约操作。因此,将 AlltoAll(写入分支)融合到 GEMM 尾部通常足以重叠通信,而归约融合(归约分支)仅提供边际性能提升。
(3) AllGather 重叠
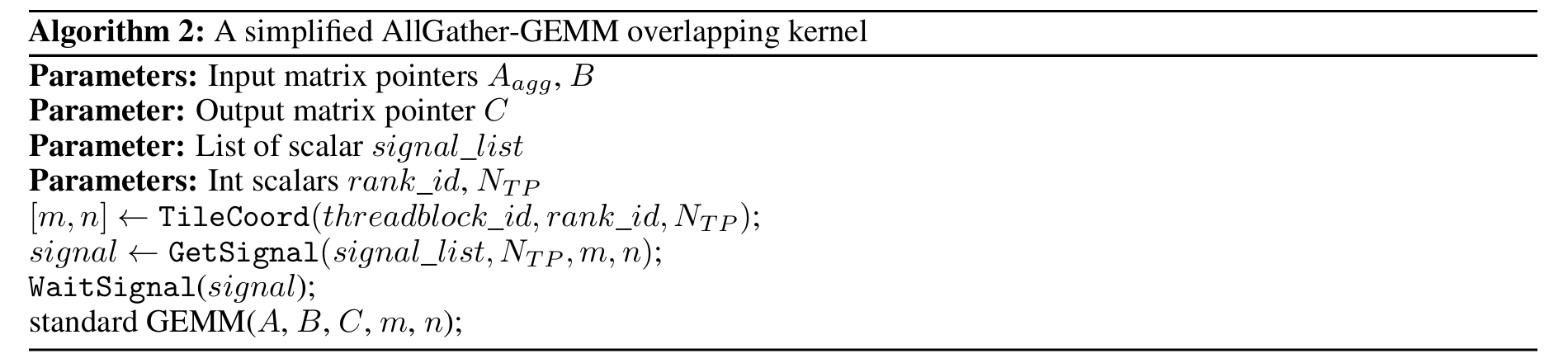
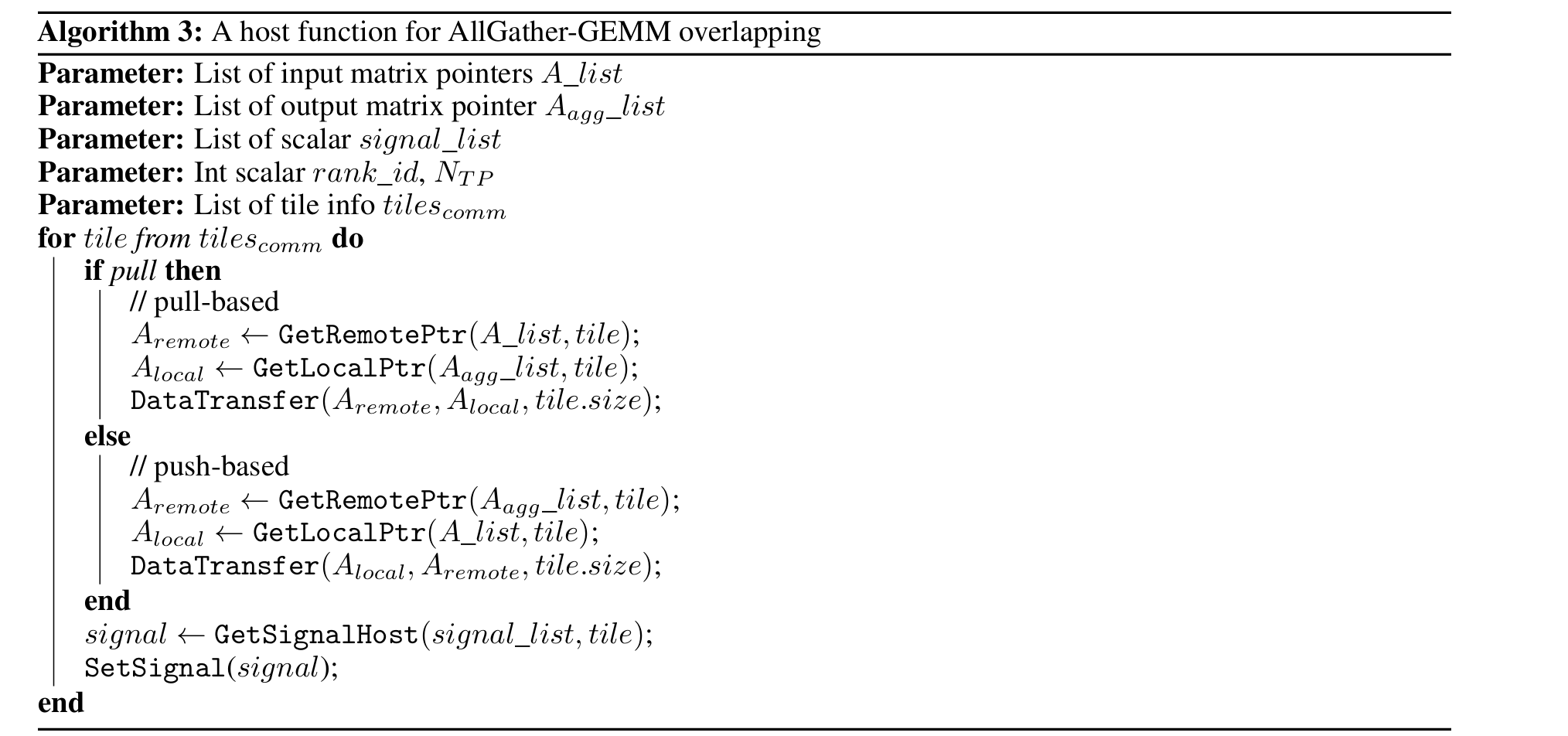
与 ReduceScatter 不同,AllGather 被实现为 GEMM 内核的前置融合。具体来说,AllGather 信号检查被融合到 GEMM 内核的前置部分。算法 2 展示了融合了 AllGather 的 GEMM 伪代码,用于计算 C = A_agg x B,其中 A_agg 是通过 AllGather 聚合的输入矩阵缓冲区, B 是另一个输入矩阵,C 是输出矩阵。算法 3 展示了对应的主机端通信。
在 kernel 端,GEMM 的 tile 计算被函数 WaitSignal 阻塞,直到信号中的值被设置为 true。信号通过 GetSignal 从信号集合(signal_list)中选择,基于输出坐标 m 和 n 以及张量并行中的设备数量 NTP。每次通信的信号只有在输入张量的对应部分(通信 tile)准备好时,才在主机端被设置为 true,意味着该部分已在运行融合内核的设备上接收。
- TileCoord:确定当前线程块负责的输出 tile。
- GetSignal:为每个 tile 关联一个信号(signal),信号表 signal_list 由 host 维护。
- WaitSignal(signal):GEMM kernel 在计算本 tile 前,先等待对应的信号变为 true(即数据已到位)。
- standard GEMM:信号满足后,正常做 GEMM 计算。
host 端(无论是拉取还是推送)执行 tile 通信操作(DataTransfer)并异步设置相应的信号(SetSignal)为 true。基于 pull 的方法通过 GetRemotePtr 函数和 GetLocalPtr 函数从远程设备 pulling tiles,从 tiles A 矩阵列表(A_list)和聚合矩阵缓冲区列表(Aagg_list)中选择正确的指针,然后设置本地信号,信号由 GetSignalHost 依据通信分块索引从信号集合(signal_list)中选取。另一方面,push 方法通过将 tiles 推送到远程设备然后设置远程信号。注意,拉取版本中的 signal_list 仅包含本地信号,而推送版本中的 signal_list 包含远程设备的信号。这两种变体的选择被视为一个调优选项
- tilescomm:通信的 tile 列表(可以和 GEMM tile 不同步)。
- DataTransfer:通过网络/PCIe/NVLink 等把数据从远端拉到本地(pull)或从本地推到远端(push)。
- SetSignal(signal):数据传输完成后,设置对应信号为 true,通知 device 侧 kernel 可以继续。
本质上:host 侧异步分 tile 通信,device 侧 kernel 只等信号,数据 ready 就算,通信和计算流水线重叠。
在 AllGather 方法中,作者将通信的等待逻辑融合到 GEMM Kernel 中,而非整个通信操作。因此,AllGather 并不必然依赖 P2P 通信。同时,在 AllGather 中,通信的分块策略(tilescomm)与 GEMM 计算的分块策略相互解耦。这一设计提供了一种灵活的权衡方式,能够在不损害 GEMM 效率的前提下,选择 Overlap 机会与通信效率之间的最佳平衡。
(4) 不同重叠技术的主要差异
ReduceScatter 中:
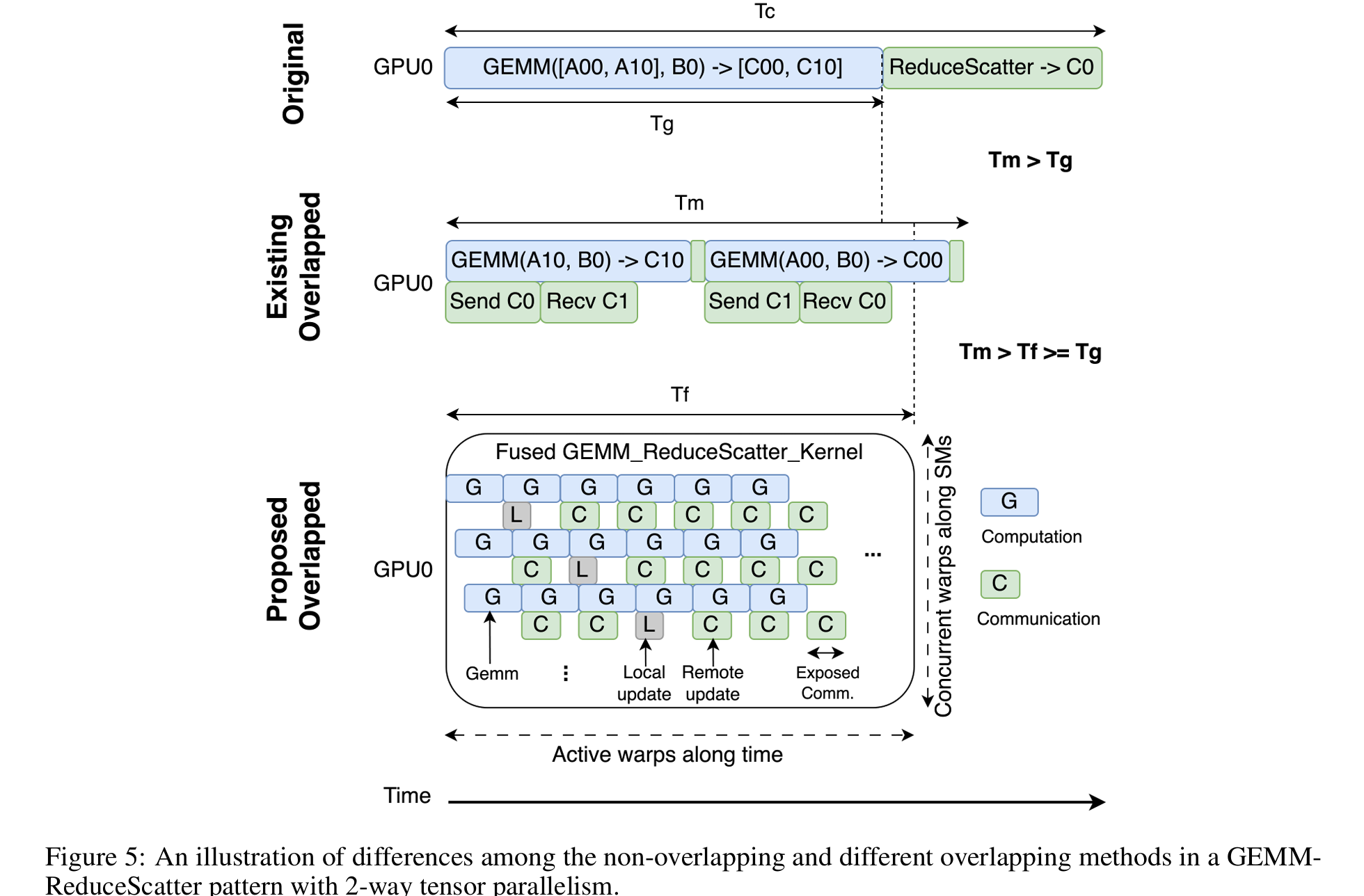
然现有的重叠方法 T_m 可能比原始的粗粒度方法 T_c 更快,但通常仍然比原始 GEMM 时间 T_g 慢。主要原因是将一个 GEMM 内核分解为多个较小的 GEMM 内核会降低 GPU 的 GEMM 效率。GEMM 通常需要足够大的矩阵以充分利用 GPU 的计算能力。数据依赖性使得这些较小的 GEMM 操作无法通过 GPU 多路复用并发运行,因而张量并行度越高,GEMM 效率越低
Flux 的 T_f 可以以几乎与原始 GEMM 操作 T_g 相同的速度执行,且开销很小。其细粒度的分解策略与现代 GPU 设计的特性完美契合,能够在上下文切换 warp 和 SMs 中数百个并发活跃 warp 之间隐藏延迟,如底部放大的视图所示。最终,作者的方法仅在执行的尾部暴露出少量通信,而不影响 GEMM 计算效率。
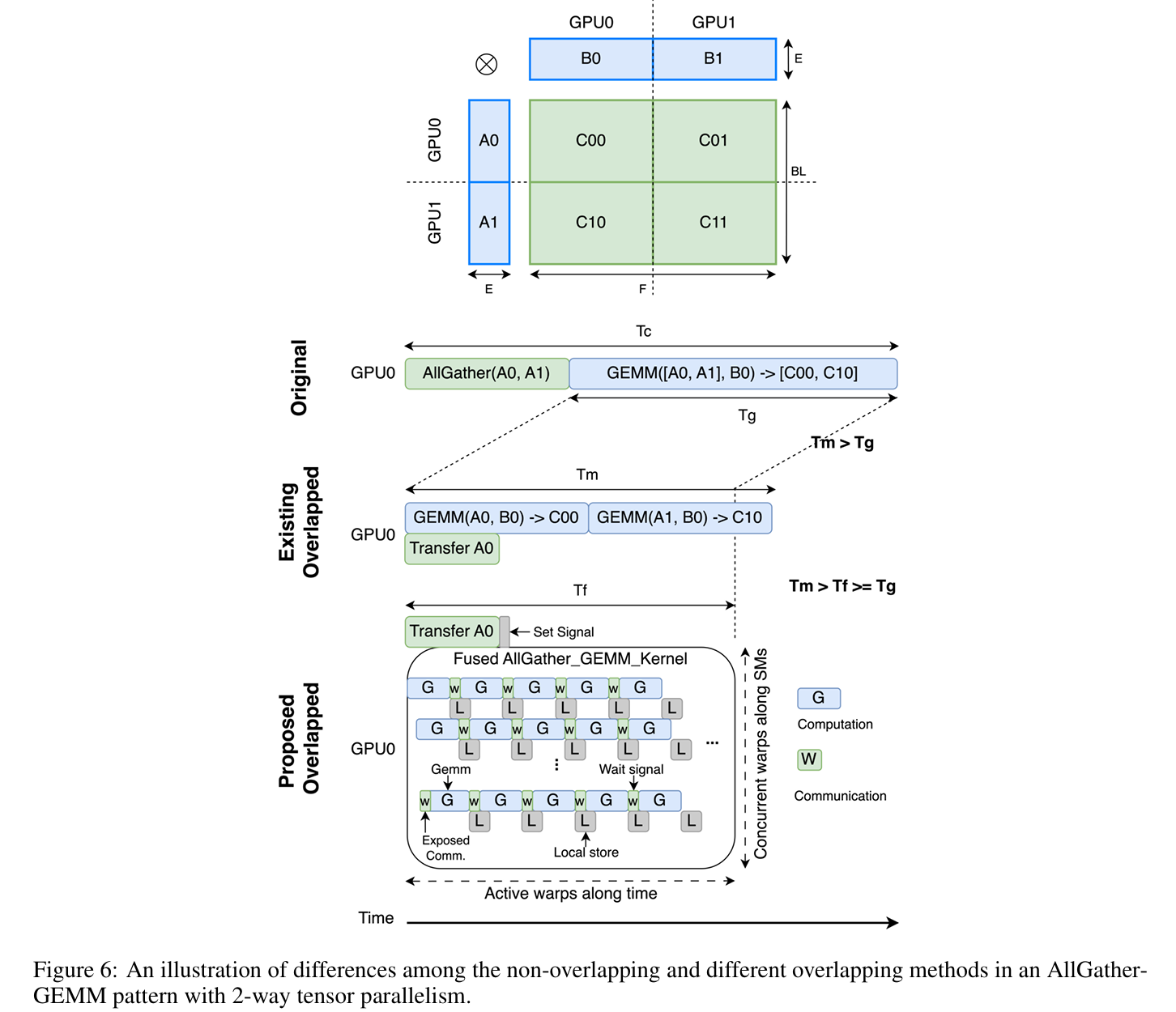
AllGather 中不同重叠技术的主要差异。同样,现有的重叠方法 T_m 可能比原始的粗粒度方法 T_c 更快,但由于 GPU GEMM 效率较低,仍然比原始 GEMM 时间 T_g 慢。AllGather 中的长延迟指令来自等待信号,这发生在每个 warp 的开始,因为 WaitSignal 被融合在前置部分。其延迟取决于对应数据传输的到达时间。对于数据已经到达的 tile,延迟接近于零。对于数据未准备好的 tile,warp 之间的上下文切换可以隐藏延迟。值得一提的是,本地 tile 的信号总是预设为 true,因此总有一些 warp 不需要等待信号。最终,作者的方法仅在执行的头部暴露出少量通信,而不影响 GEMM 计算效率。
四、优化和实现细节
(1) tile 坐标的 swizzling
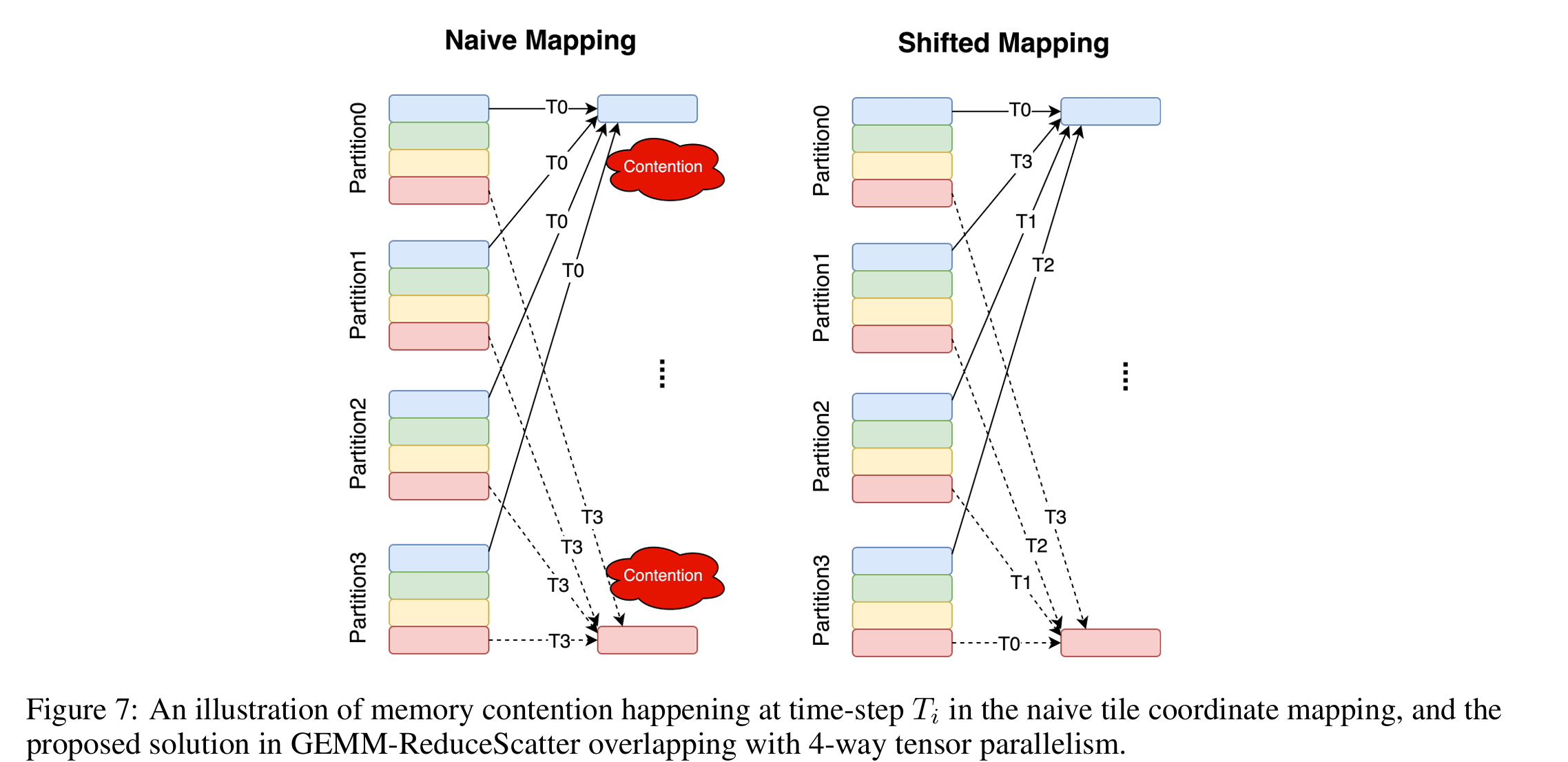
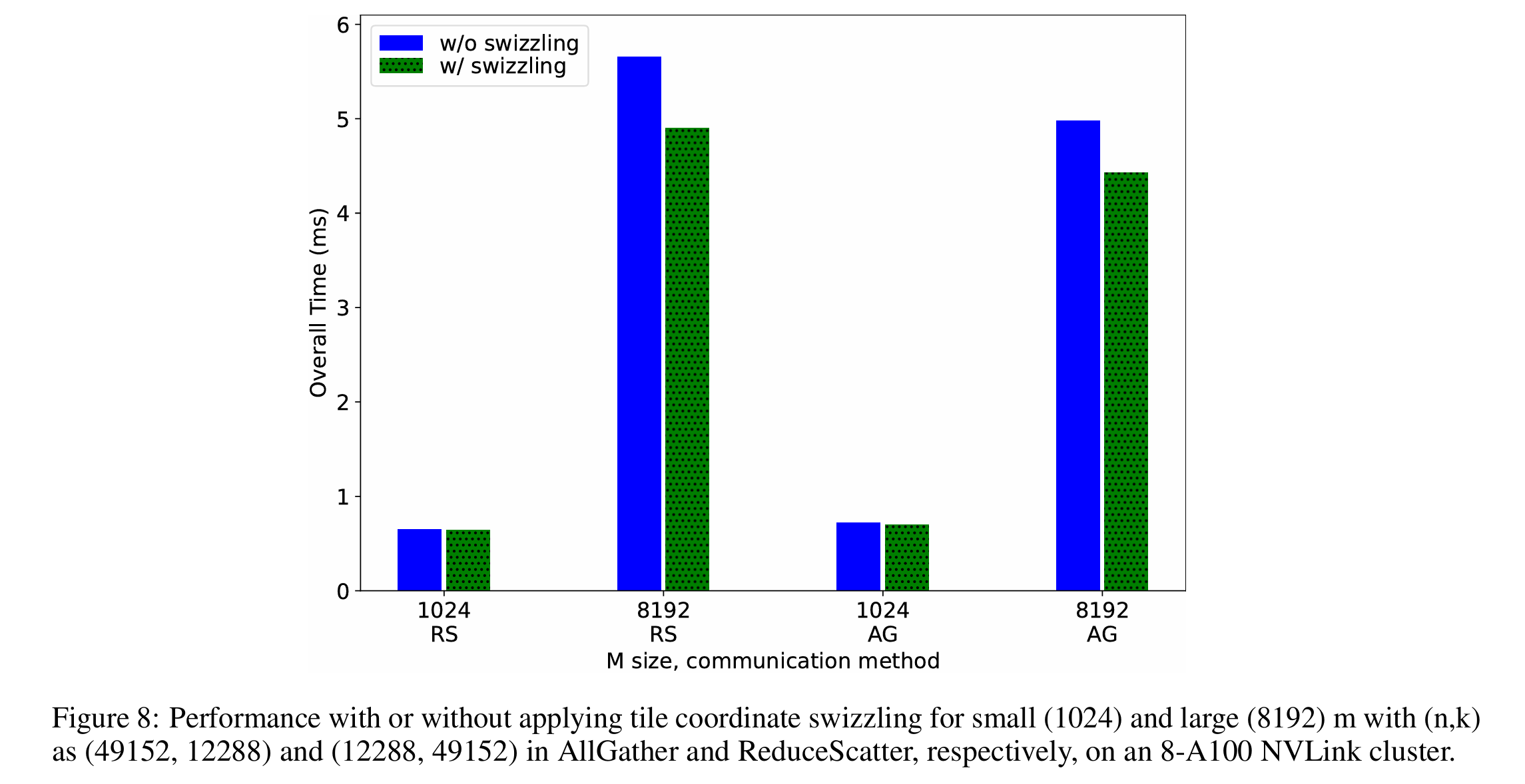
高效的 GPU 内核依赖于 tiling 来利用并行性和局部性。因此,内核具有从线程块索引到 tile 坐标的映射逻辑,如算法 1 和 2 中的 TileCoord。受优化良好的 GEMM 中用于最大化内存效率的映射逻辑启发,Flux 探索了 tile 坐标的 swizzling,以进一步提高融合内核的效率。Swizzling 在这里指的是对 tile(块)分配到线程块/设备的顺序做有意识的“打乱”或“偏移”,而不是简单的线性分配。
- 在融合的 GEMM-ReduceScatter 中,tile 坐标与设备 rank 索引一起偏移,以避免不同设备上运行的内核产生写请求冲突,从而最大限度地减少每个设备上内存控制器的可能争用。
- 融合的 AllGather-GEMM,以最小化线程块等待,从而减少整体延迟。融合的 AllGather-GEMM 需要 tile 坐标 swizzling(TileCoord)与信号到达顺序对齐,该顺序由主机端的通信顺序决定(由算法 3 中的 tilescomm 控制)。在实现中,这两种顺序根据网络拓扑一起选择,以最小化整体延迟
- host 侧通信(tilescomm)决定了数据到达的顺序。
- kernel 侧 TileCoord swizzling 让线程块优先等那些最早到的数据。
- 这样,kernel 线程块不会因为 tile 分配顺序不合理而长时间 idle。
(2) ReduceScatter 的实现细节
(a) 写操作:
在本地 GPU 或节点内的 P2P GPU 上写入数据的实现包括:
- 使用所有变体的
st指令(包括向量版本)将数据从寄存器存储到全局内存。 - 使用
cp.async.bulk指令或 Hopper GPU 上的cp.async.bulk.tensor指令将数据从 scratchpad 存储到全局内存。 - 对于节点间的远程 GPU 写入,使用 NVSHMEM,通过各种 put API 实现。这些方法使用 CUTLASS EVT 模板实现,模板参数在自动调优期间选择。
(b) Reduce:
- 如果 GPU 支持 P2P 内存访问,可以使用
red或原子指令直接在设备内存上实现归约,而无需更改代码结构或引入过多开销。这些指令有用,但可能不支持所有数据类型或所有 GPU。因此,作者仅对支持的 GPU 和数据类型应用这些指令。 - 在 Hopper GPU 上,使用 warp 或线程块专门化实现归约,每个 GPU 将部分结果写入其本地内存,然后由专门的 warp 或线程块拉取就绪的远程数据,在目标 GPU 上执行本地归约。这种 warp 或线程块专门化的归约方法在 Hopper 上与专门化的 GEMM 内核配合良好。
- 对于节点间远程 GPU,仅在内核中融合 AlltoAll,并执行离散归约。所有方法也使用 CUTLASS EVT 模板实现,模板参数在自动调优期间选择
(3) AllGather 的实现细节
(a) 数据传输:
虽然提出的 AllGather 算法不需要 P2P,但作者仍然区分有 P2P 和无 P2P 的实现。对于支持 P2P 内存访问的 GPU,可以通过 cudaMemcpy API 实现基于拉取或推送的传输。主要区别在于指针:拉取使用本地目标指针和远程源指针,而推送则相反。对于不支持 P2P 访问的 GPU,使用 NCCL 的 send/recv。由于 NCCL 的 send/recv 是配对的,因此没有拉取或推送的区别。
(b) 信号设计:
使用常规的 32 位 GPU 内存来实现信号。所有信号连续分配,以便于预设和重置,它们在相应的 PyTorch 操作初始化时预设,或在相应的 GEMM 计算后通过流和事件重置,避免数据竞争。在主机端,通过 cuStreamWriteValue API 与流一起设置信号,而在内核中,WaitSignal 通过自悬实现。
(c) 通信 tile 大小:
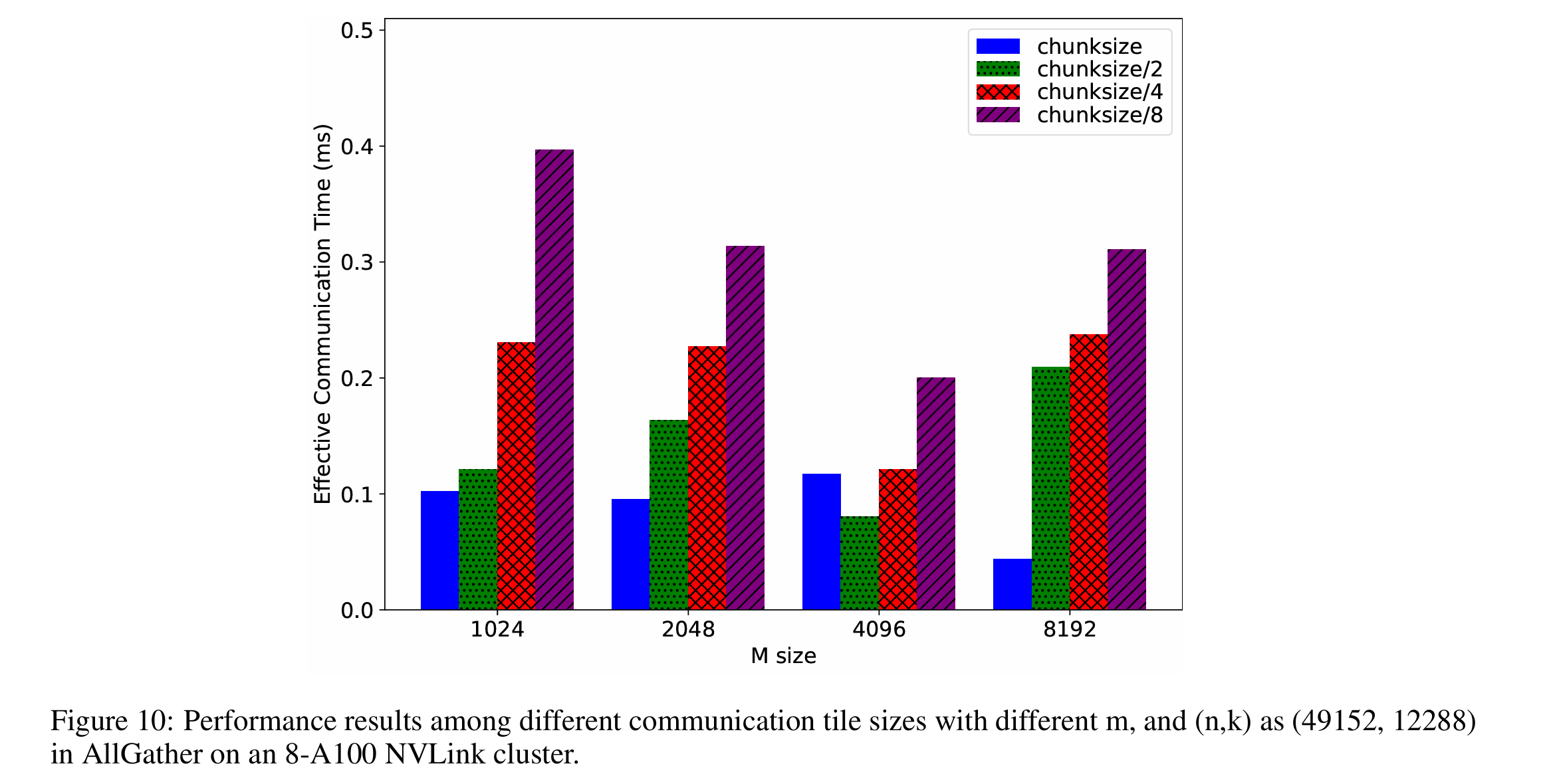
在 AllGather 中,通信 tiling 与 GEMM 计算 tiling 分离,以避免干扰 GEMM 的 tiling,因为 GEMM 性能对 tiling 敏感。独立调整通信 tiling 使作者能够在重叠机会和通信效率之间找到最佳平衡,最小化有效通信时间。在调优过程中,作者从中等粒度分区的 tiling 大小开始(如图 10 中的 chunksize 所示),即 tiling 大小等于 m 除以张量并行度,然后不断除以二直到等于 GEMM 的 tile 大小。图 10 显示通信 tile 大小确实影响整体性能。然而,由于没有明显的趋势表明一种大小总是优于其他,因此应用自动调优来选择最佳的 tiling 因子。
(d) tile 间的通信顺序:
主机端的通信顺序与 tile 坐标 swizzling 对齐,并根据网络拓扑选择以最小化整体延迟。节点内的 NVLink 互连采用从本地 rank 开始的环形顺序进行直接通信。例如,给定 8 路张量并行中的本地 rank 索引 5,其通信顺序为 6, 7, 0, 1, 2, 3, 4。节点内的 PCIe 互连使用基于环的通信来高效利用单节点张量并行的 PCIe 带宽。
(4) GEMM 实现与自动调优
由于 Flux 中的 GEMM 规则 tiling 不受张量并行度的限制,tiling 大小可以调整而不影响正确性。Flux 使用 CUTLASS 实现,以完全控制 GEMM 的 tiling 以及相应的前序或后序融合。类似于传统的 GEMM 库根据矩阵形状、数据类型和 GPU 架构进行调优和选择 GEMM 内核,所有 forward、backward、GEMM 算法和调优选项都写在模板中,可以通过选择合适的模板参数来自动调优内核
五、实验
(1) 测试环境
Flux 使用 CUTLASS 3.4.1 和 NVSHMEM 2.10.1 实现,评估使用 bfloat16 在三个不同的集群上进行:
- A100 PCIe 集群:每个节点 8 个 GPU,使用 PCIe 进行节点内互连,2 个 100Gbps 的节点间互连(每 4 个 GPU 和 1 个 NIC 连接到一个 CPU 核心)。
- A100 NVLink 集群:每个节点 8 个 GPU,使用 NVLink 进行节点内互连,4 个 200Gbps 的节点间互连(每 2 个 GPU 共享 1 个 200Gbps 的节点间互连)。
- H800 NVLink 集群:每个节点 8 个 GPU,使用 NVLink 进行节点内互连,8 个 400Gbps 的节点间互连(每个 GPU 有一个专用的 400Gbps 节点间互连)。
(2) 测试 overlap
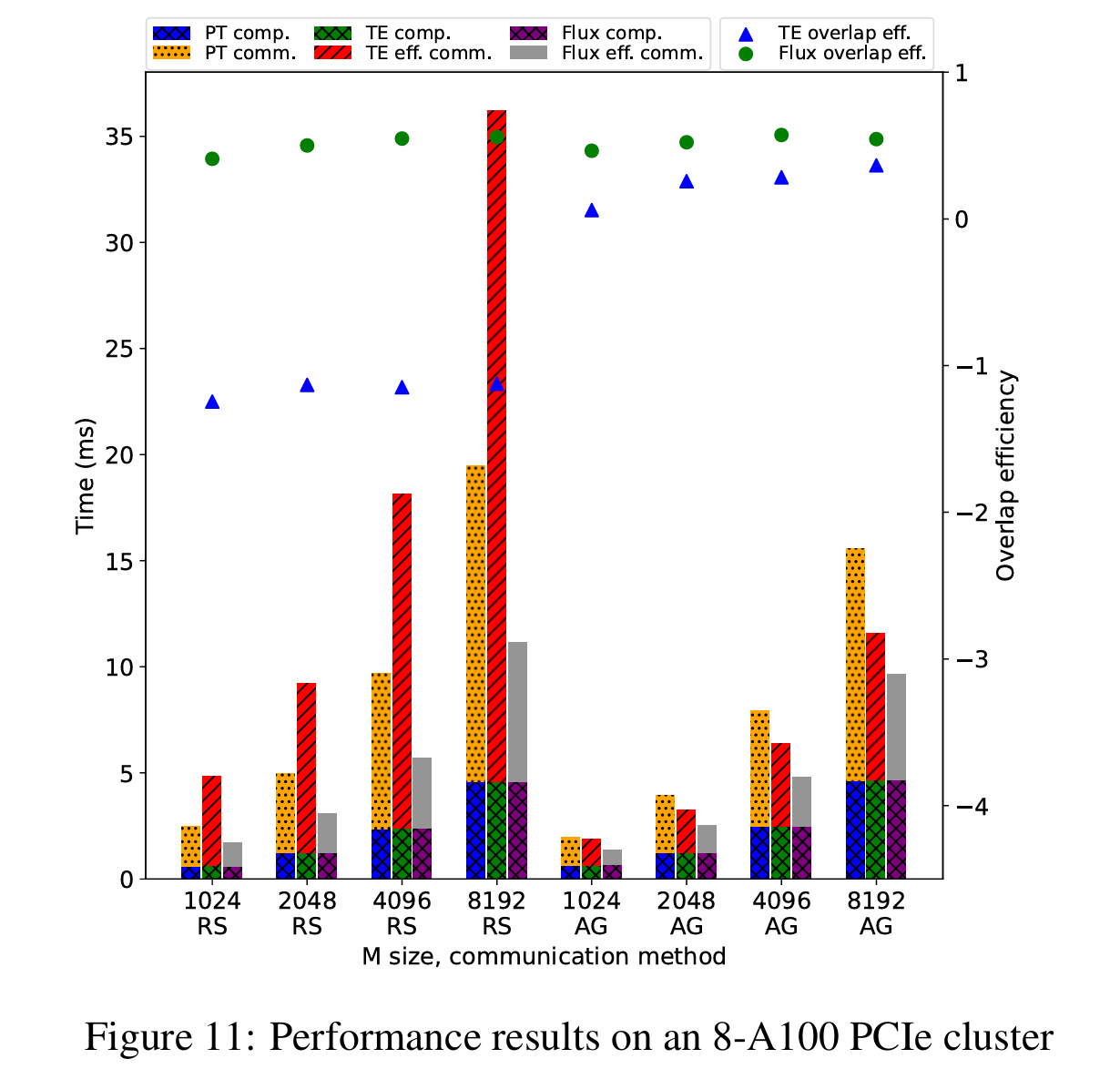
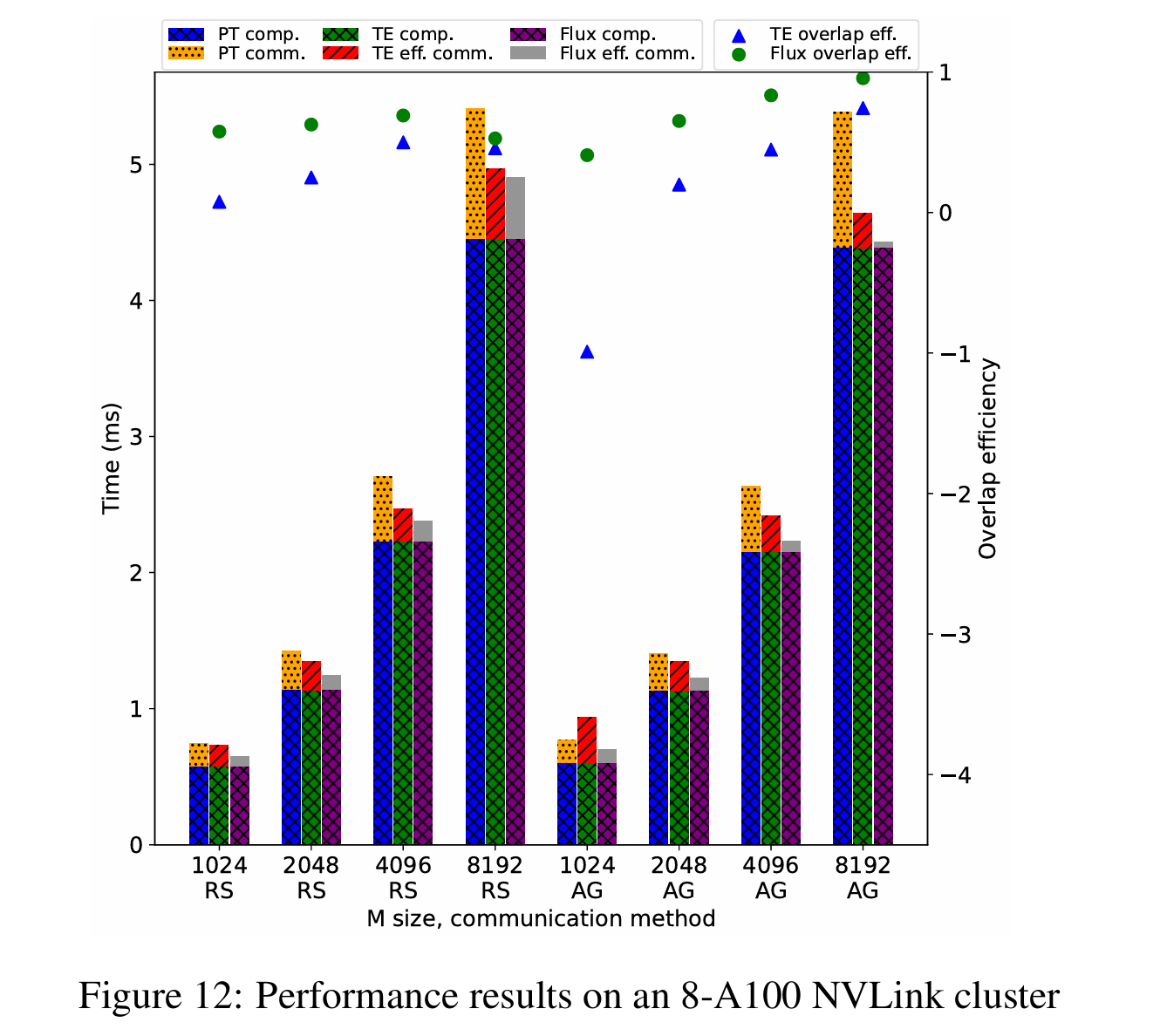
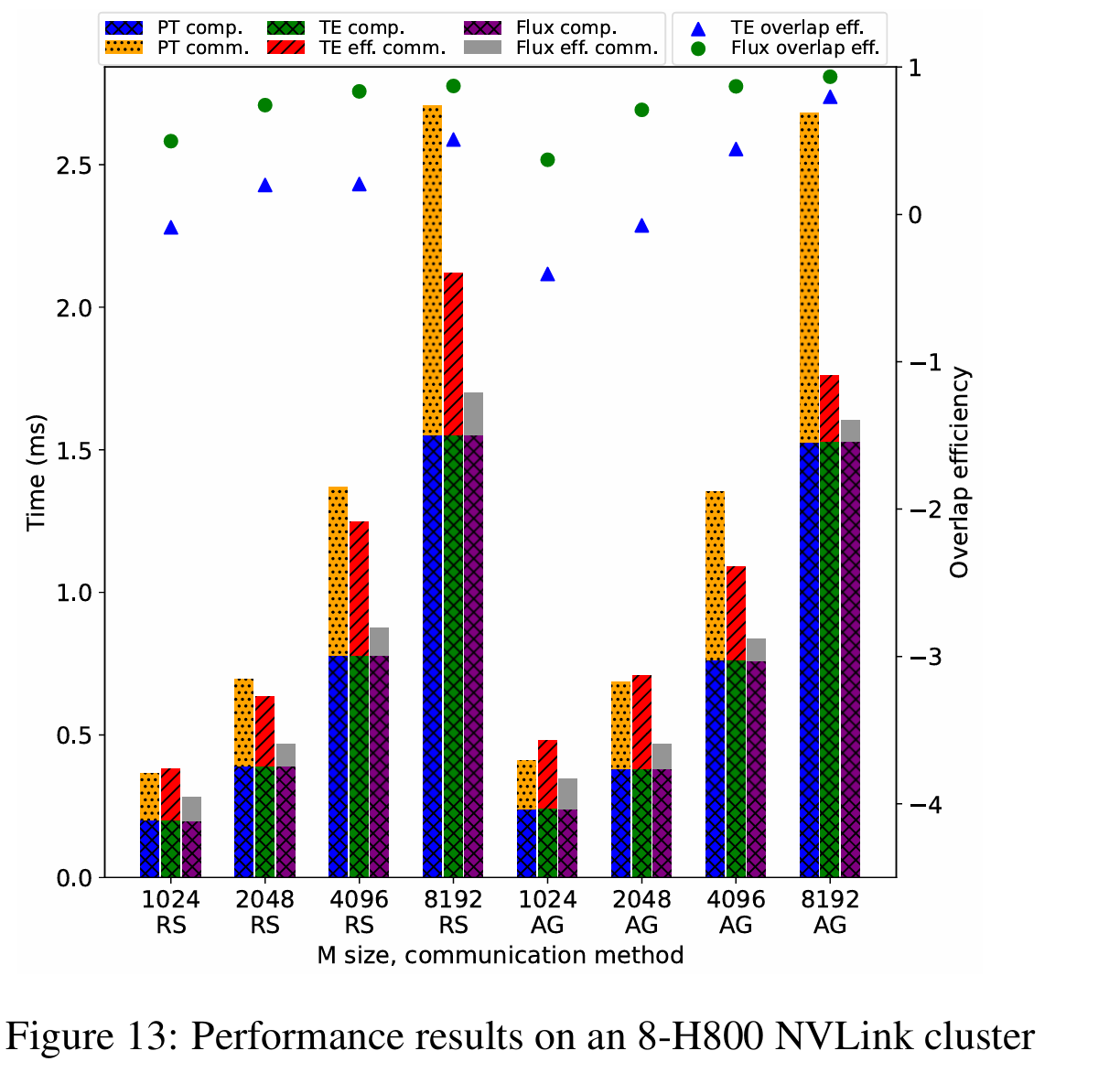
评估的 GEMM 尺寸选自 GPT-3 175B,因此在 AllGather 和 ReduceScatter 中,(n, k)分别为(49152, 12288)和(12288, 49152)。使用(n, k)作为应用张量并行前的原始形状。评估了 m 从 1024 到 8192 的 GEMM,以模拟训练和预填充阶段的不同工作负载:
Flux 在 A100 PCIe 上可提供 1.20x 到 3.25x 的加速,在 A100 NVLink 上为 1.01x 到 1.33x,在 H800 NVLink 上为 1.10x 到 1.51x。就重叠效率而言,Flux 在 A100 PCIe 上可提供 41% 到 57%,在 A100 NVLink 上为 36% 到 96%,在 H800 NVLink 上为 37% 到 93%,而 TransformerEngine 在 A100 PCIe 上为-125% 到 36%,在 A100 NVLink 上为-99% 到 74%,在 H800 NVLink 上为-40% 到 80%。负的重叠效率意味着性能比非重叠基线更差。
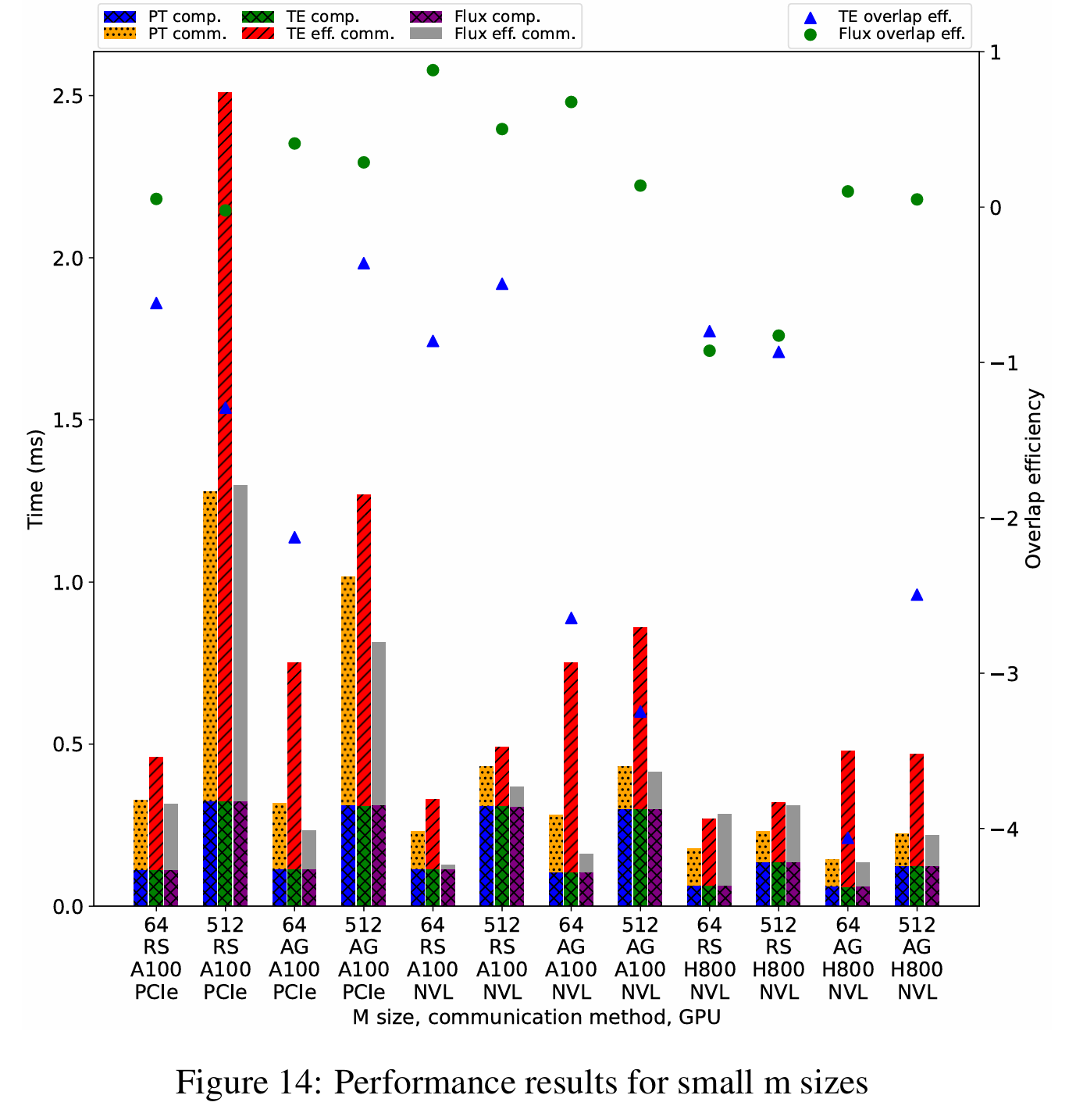
对于更小 m 尺寸:m 为 64 和 512 的小规模工作负载以模拟解码阶段。在这些评估尺寸下,Flux 在 A100 PCIe 上可提供 1.45x 到 3.21x 的加速,在 A100 NVLink 上为 1.33x 到 4.68x,在 H800 NVLink 上从 0.95x 减速到 1.03x 加速。就重叠效率而言,Flux 在 A100 PCIe 上为-2% 到 41%,在 A100 NVLink 上为 14% 到 88%,在 H800 NVLink 上为-165% 到-82%,而 TransformerEngine 在 A100 PCIe 上为-213% 到-36%,在 A100 NVLink 上为-325% 到-49%,在 H800 NVLink 上为-142% 到-93%。
(3) 测试训推
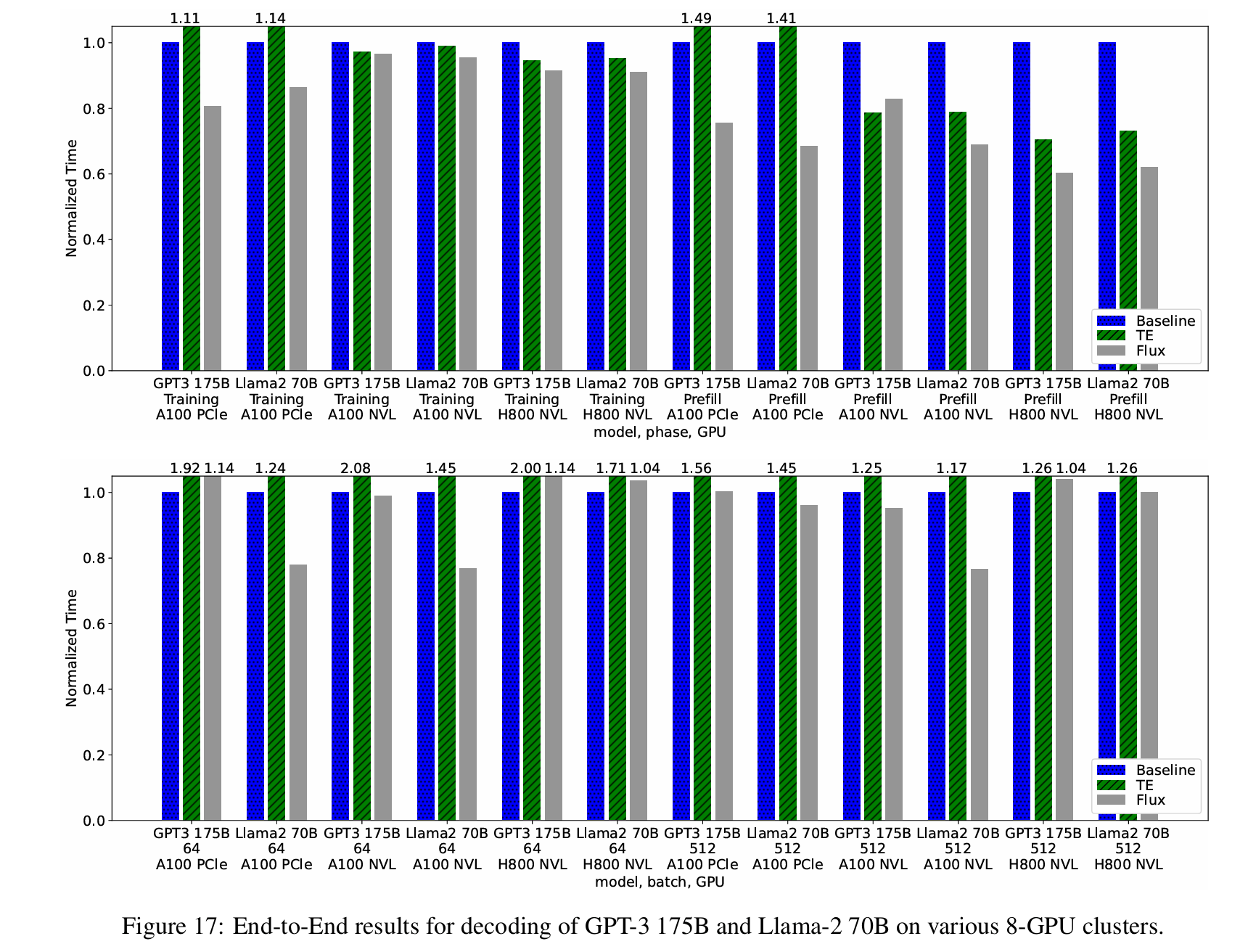
评估的模型为 GPT-3 175B 和 Llama-2 70B,涵盖训练和推理。在训练中,作者使用 MegatronLM core r0.4.08 进行 GPT-3 175B 的训练,使用 Megatron-LLaMA 进行 Llama-2 70B 的训练,运行在 128-GPU 集群上,采用 2 路数据并行、8 路流水线并行和 8 路张量并行。报告的训练时间包括梯度和优化器阶段。在推理中,作者使用 vLLM 0.2.1,预填充阶段的批量大小为 8,序列长度为 2048,解码阶段的批量大小为 64 或 512。
- 相比 TransformerEngine,Flux 在 A100 PCIe 上可提供高达 1.37 倍的训练加速、2.06 倍的预填充加速和 1.69 倍的解码加速;在 A100 NVLink 上为 1.04 倍的训练加速、1.14 倍的预填充加速和 2.10 倍的解码加速;在 H800 NVLink 上为 1.05 倍的训练加速、1.18 倍的预填充加速和 1.76 倍的解码加速。
- 相比 Megatron-LM 和 vLLM 基线,Flux 在 A100 PCIe 上可提供高达 1.24 倍的训练加速、1.46 倍的预填充加速和 1.28 倍的解码加速;在 A100 NVLink 上为 1.05 倍的训练加速、1.45 倍的预填充加速和 1.30 倍的解码加速;在 H800 NVLink 上为 1.10 倍的训练加速、1.66 倍的预填充加速,但解码阶段没有加速。
六、思考
- Flux 已将 AllGather (前置) 与 ReduceScatter (后置) 分别与 GEMM 内核融合,但对于更复杂的多步通信(如 AllReduce、AllToAll、分层 Ring、树型集体通信等)是否可以统一成一种泛化融合范式?比如自动识别并融合任意矩阵算子与上层通信语义。
- 目前主要覆盖张量并行,如果与流水线并行/数据并行更紧密地融合,例如跨 tensor-parallel stage tile 级流水优化,是否能够带来新的性能提升。
- 细粒度 tile 通信易导致更多中间 buffer 和信号变量管理,是否会对显存利用率和内存带宽提出新压力?